Advanced Soft Robot Modeling in ChainQueen
Publication
Robotica
Authors
Andrew Spielberg, Tao Du, Yuanming Hu, Daniela Rus, Wojciech Matusik
Abstract
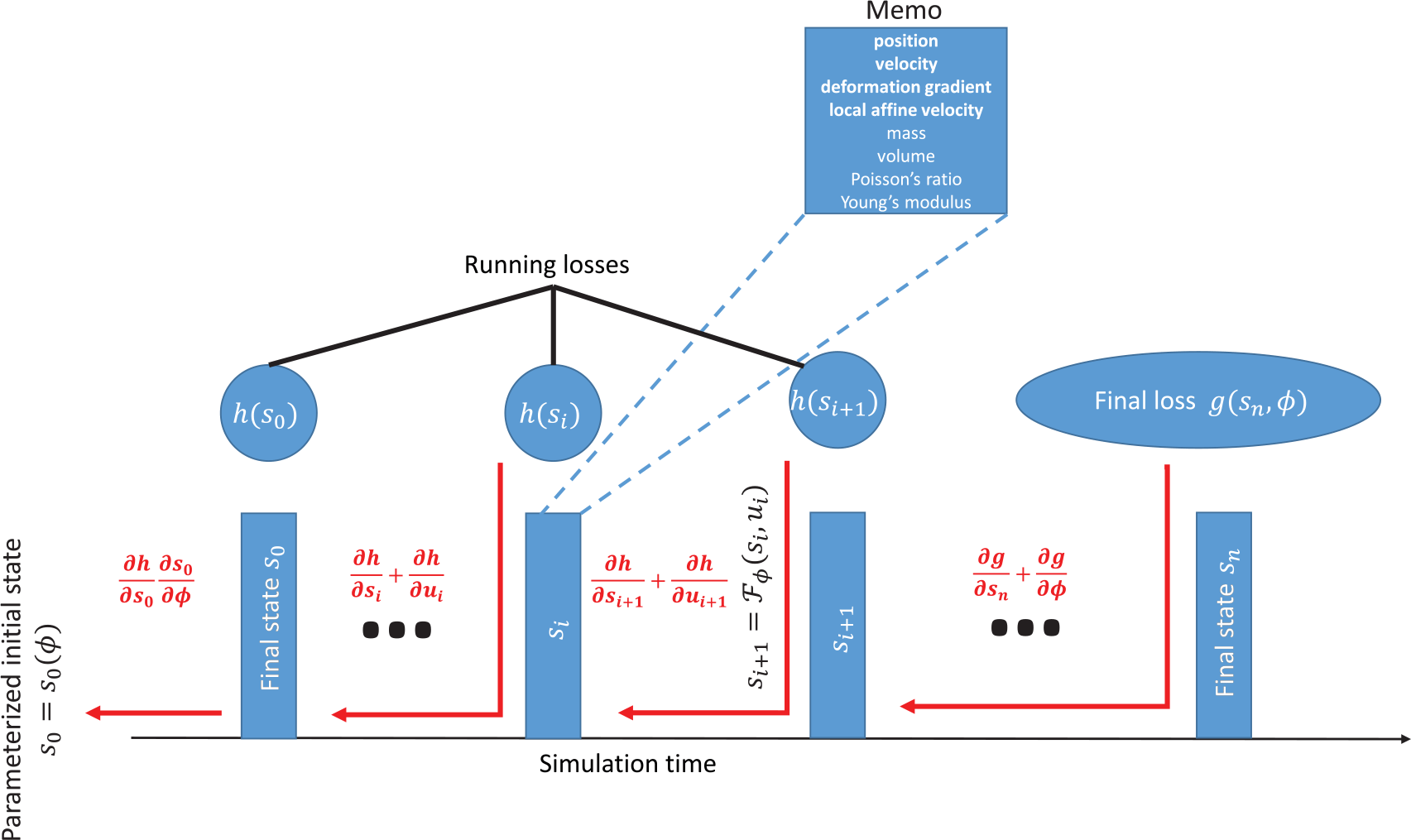
We present extensions to ChainQueen, an open source, fully differentiable material point method simulator for soft robotics. Previous work established ChainQueen as a powerful tool for inference, control, and co-design for soft robotics. We detail enhancements to ChainQueen, allowing for more efficient simulation and optimization and expressive co-optimization over material properties and geometric parameters. We package our simulator extensions in an easy-to-use, modular application programming interface (API) with predefined observation models, controllers, actuators, optimizers, and geometric processing tools, making it simple to prototype complex experiments in 50 lines or fewer. We demonstrate the power of our simulator extensions in over nine simulated experiments.