Multi-Objective Graph Heuristic Search for Terrestrial Robot Design
Publication
ICRA
Authors
Jie Xu, Andrew Spielberg, Allan Zhao, Daniela Rus, Wojciech Matusik
Abstract
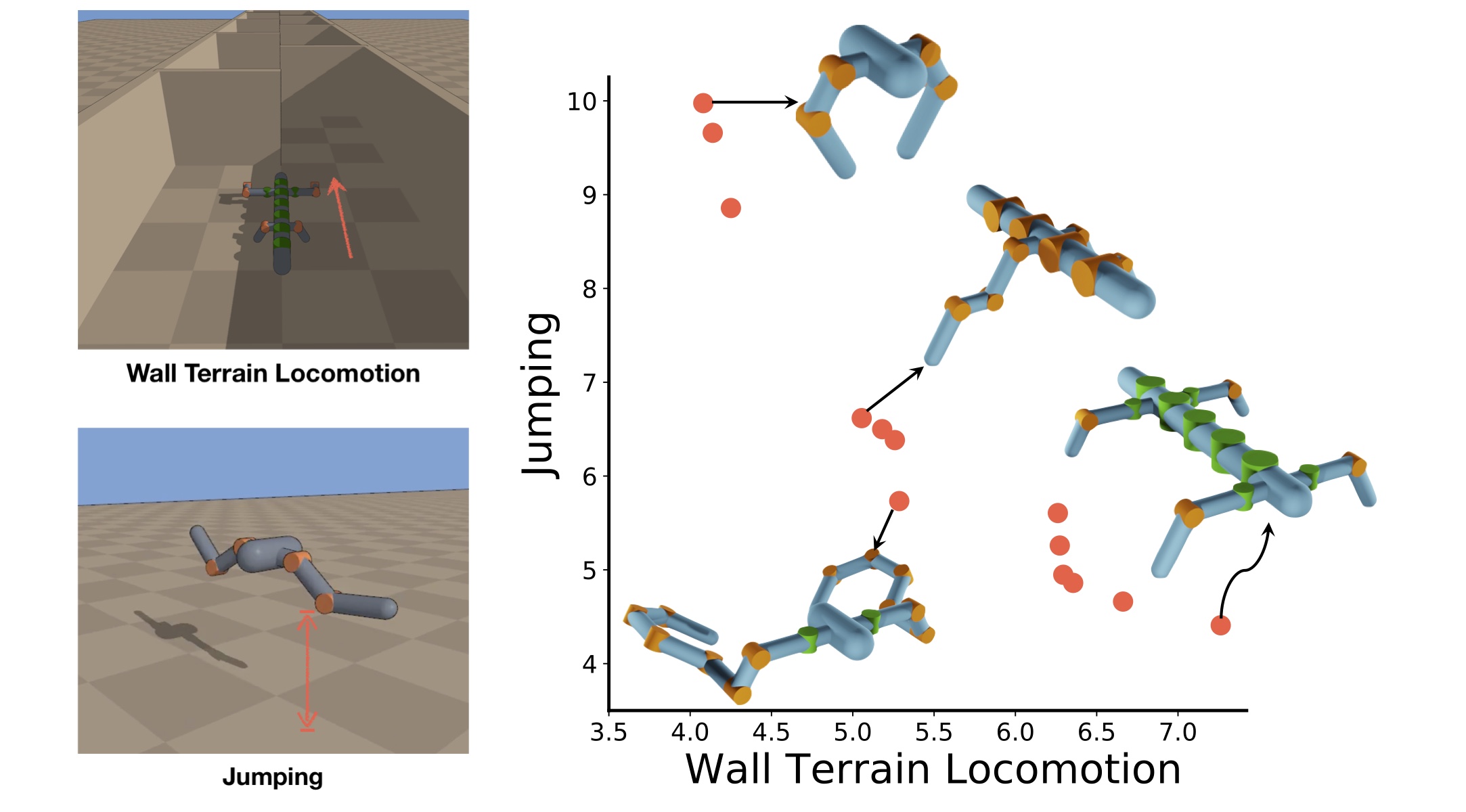
We present methods for co-designing rigid robots over control and morphology (including discrete topology) over multiple objectives. Previous work has addressed problems in single-objective robot co-design or multi-objective control. However, the joint multi-objective co-design problem is extremely important for generating capable, versatile, algorithmically designed robots. In this work, we present Multi-Objective Graph Heuristic Search, which extends a single-objective graph heuristic search from previous work to enable a highly efficient multi-objective search in a combinatorial design topology space. Core to this approach, we introduce a new universal, multi-objective heuristic function based on graph neural networks that is able to effectively leverage learned information between different task trade-offs. We demonstrate our approach on six combinations of seven terrestrial locomotion and design tasks, including one three-objective example. We compare the captured Pareto fronts across different methods and demonstrate that our multi-objective graph heuristic search quantitatively and qualitatively outperforms other techniques.