Interactive robogami: data-driven design for 3D print and fold robots with ground locomotion
Publication
SIGGRAPH
Authors
Adriana Schulz, Cynthia R. Sung, Andrew Spielberg, Wei Zhao, Yu Cheng, Ankur M. Mehta, Eitan Grinspun, Daniela Rus, Wojciech Matusik
Abstract
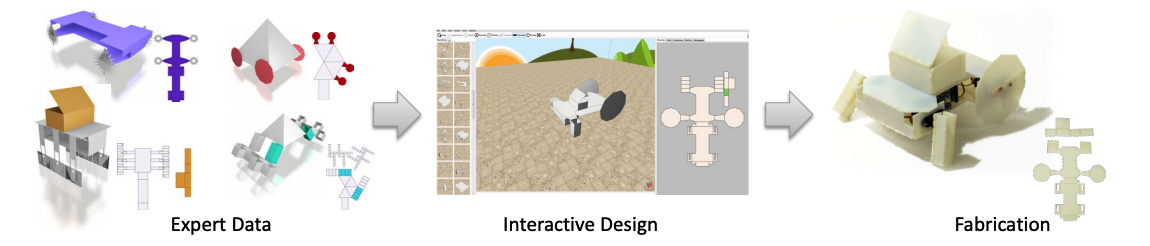
The process of designing and programming a new robot requires expert knowledge and design skills that are often acquired over the course of many years. This makes design of new robots difficult for non-experienced users. In addition to design, physical realization of a robot is also time and labor intensive. We propose a new fabrication process for mechanical robots, called 3D print and fold, which combines 3D printing with origami fabrication methods. In our technique, robots are 3D printed as flat faces connected at joints and are then folded into their final shape. To help casual users design ground robots using our 3D print and fold technique, we present our Interactive Robogami system. The system leverages a database of examples created by expert roboticists. A composition tool allows users to create new designs by composing parts from the robots in this database. The system automatically ensures that the assembled robot is fabricable and that it can locomote forward while still giving creative freedom to users.