Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting
Publication
ACM CHI
Authors
Yiyue Luo, Kui Wu, Andrew Spielberg, Michael Foshey, Tomas Palacios, Daniela Rus, Wojciech Matusik
Abstract
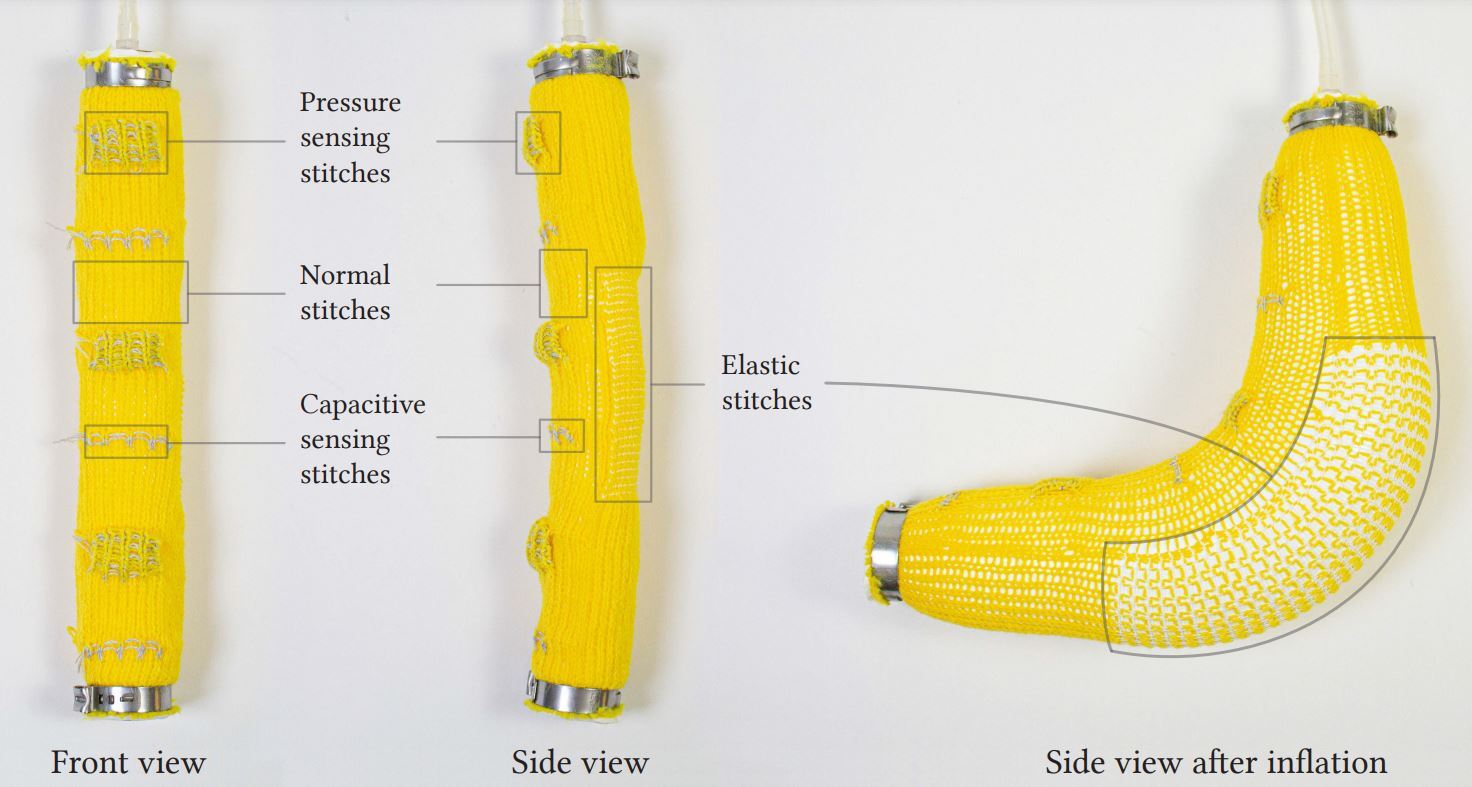
Soft actuators with integrated sensing have shown utility in a variety of applications such as assistive wearables, robotics, and interactive input devices. Despite their promise, these actuators can be difficult to both design and fabricate. As a solution, we present a workflow for computationally designing and digitally fabricating soft pneumatic actuators via a machine knitting process. Machine knitting is attractive as a fabrication process because it is fast, digital (programmable), and provides access to a rich material library of functional yarns for specified mechanical behavior and integrated sensing. Our method uses elastic stitches to construct non-homogeneous knitting structures, which program the bending of actuators when inflated. Our method also integrates pressure and swept frequency capacitive sensing structures using conductive yarns. The entire knitted structure is fabricated automatically in a single machine run. We further provide a computational design interface for the user to interactively preview actuators’ quasi-static shape when authoring elastic stitches. Our sensing-integrated actuators are cost-effective, easy to design, robust to large actuation, and require minimal manual post-processing. We demonstrate five use-cases of our actuators in relevant application settings.