Designing Cable-Driven Actuation Networks for Kinematic Chains and Trees
Publication
ACM SIGGRAPH / Eurographics Symposium on Computer Animation (SCA) 2017
Authors
Vittorio Megaro*, Espen Knoop*, Andrew Spielberg*, David I.W. Levin, Wojciech Matusik, Markus Gross, Bernhard Thomaszewski, Moritz Bächer
Abstract
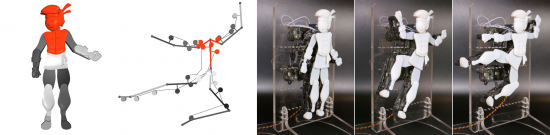
In this paper, we present an optimization-based approach for the design of cable-driven kinematic chains and trees. Our system takes as input a hierarchical assembly consisting of rigid links jointed together with hinges. The user also specifies a set of target poses or keyframes using inverse kinematics. Our approach places torsional springs at the joints and computes a cable network that allows us to reproduce the specified target poses. We start with a large set of cables that have randomly chosen routing points and we gradually remove the redundancy. Then we refine the routing points taking into account the path between poses or keyframes in order to further reduce the number of cables and minimize required control forces. We propose a reduced coordinate formulation that links control forces to joint angles and routing points, enabling the co-optimization of a cable network together with the required actuation forces. We demonstrate the efficacy of our technique by designing and fabricating a cable-driven, animated character, an animatronic hand, and a specialized gripper.